Jairo Maldonado-Contreras
Robotics PhD Candidate at Georgia Tech

Hi! My name is Jairo, and I’m a Robotics PhD candidate at the Georgia Institute of Technology, working under the mentorship of Aaron Young. My research focuses on human intent recognition and the development of deep learning models to enhance lower-limb prosthetic control.
Before joining Georgia Tech, I completed my B.S. in Mechanical Engineering at CSU Long Beach, where I received the College of Engineering’s 2019 Outstanding Graduate Award. During my studies, I gained valuable experience through internships at renowned institutions, including NASA JPL, MIT, MIT Lincoln Laboratory, and the Shirley Ryan Ability Lab, working on cutting-edge robotics and assistive technologies.
I have extensive experience in deploying real-time deep neural networks, incremental learning frameworks, domain adaptation techniques, probabilistic inference and optimization, visual perception systems, and autonomous robotic navigation. Additionally, I specialize in the design, fabrication, and control of complex multi-degree-of-freedom mechanisms.
I am currently seeking full-time opportunities in physical AI, where I can integrate artificial intelligence with physical systems to create intelligent machines capable of interacting with the real world. I am driven by the potential of AI to improve the human experience. My extensive background in robotics and AI has prepared me to tackle complex challenges in this space.
publications
-
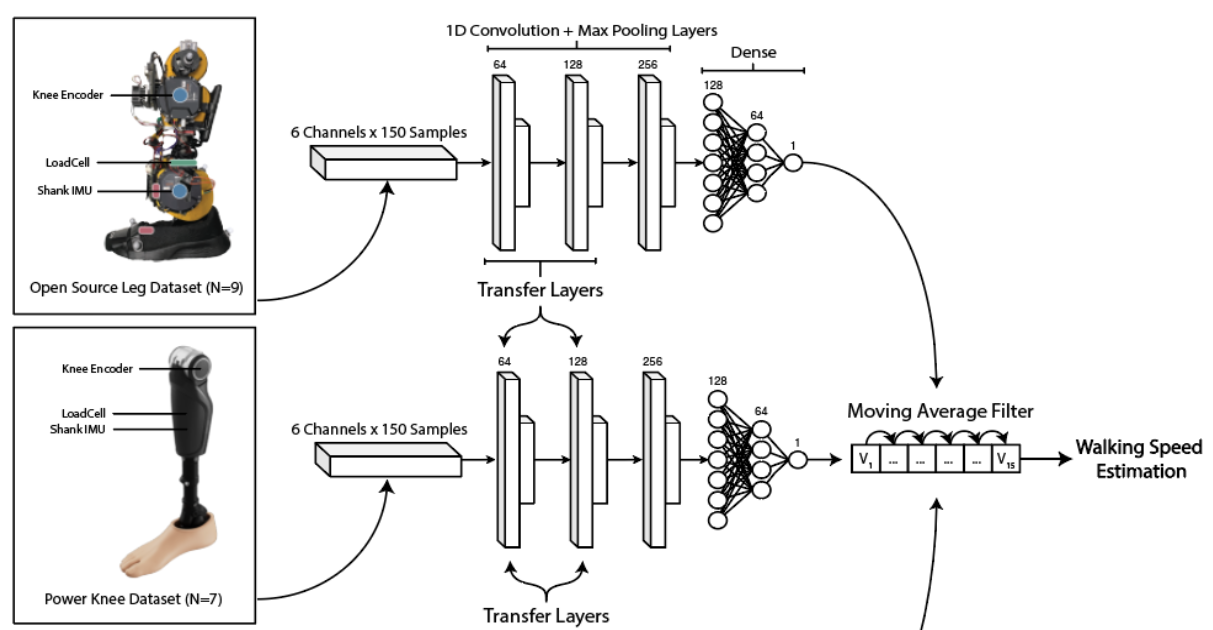 Transfer Learning for Walking Speed Estimation Across Novel Prosthetic Devices and PopulationsUnder Review @ ICRA
Transfer Learning for Walking Speed Estimation Across Novel Prosthetic Devices and PopulationsUnder Review @ ICRA -
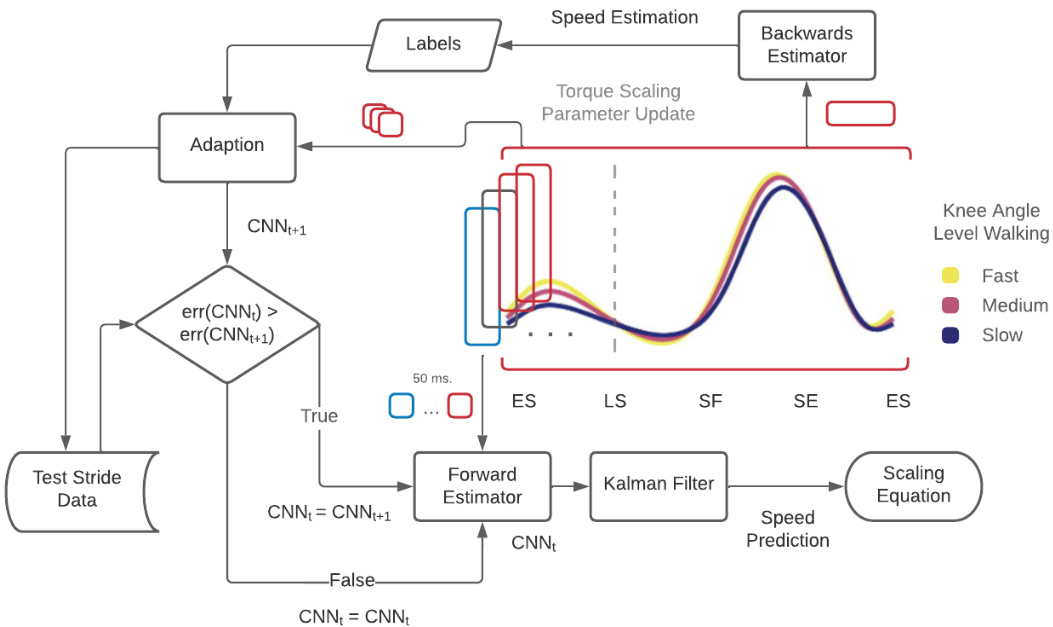
 Real-time Adaptation of Deep Learning Walking Speed Estimators Enables Biomimetic Assistance Modulation in an Open-Source Bionic LegUnder Review @ TMRB
Real-time Adaptation of Deep Learning Walking Speed Estimators Enables Biomimetic Assistance Modulation in an Open-Source Bionic LegUnder Review @ TMRB -
 Continuous-Context, User-Independent, Real-Time Intent Recognition for Powered Lower-Limb ProsthesesUnder Review @ ASME
Continuous-Context, User-Independent, Real-Time Intent Recognition for Powered Lower-Limb ProsthesesUnder Review @ ASME -
 Accelerating Constrained Continual Learning with Dynamic Active Learning: A Study in Adaptive Speed Estimation for Lower-Limb ProsthesesInternational Symposium on Medical Robotics (ISMR), 2024
Accelerating Constrained Continual Learning with Dynamic Active Learning: A Study in Adaptive Speed Estimation for Lower-Limb ProsthesesInternational Symposium on Medical Robotics (ISMR), 2024 -
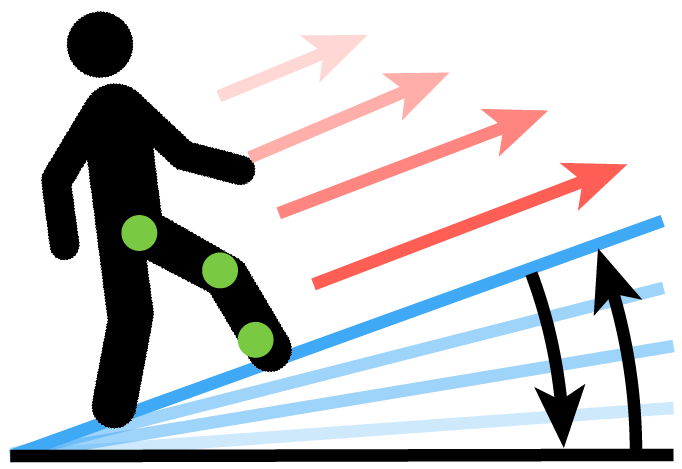 User- and Speed-Independent Slope Estimation for Lower-Extremity Wearable Robots (Open-source Dataset)Annals of Biomedical Engineering (ABME), 2023
User- and Speed-Independent Slope Estimation for Lower-Extremity Wearable Robots (Open-source Dataset)Annals of Biomedical Engineering (ABME), 2023 -
 Adaptive Lower-Limb Prosthetic Control: Towards Personalized Intent Recognition & Context EstimationJournal of Medical Robotics Research (JMRR), 2023
Adaptive Lower-Limb Prosthetic Control: Towards Personalized Intent Recognition & Context EstimationJournal of Medical Robotics Research (JMRR), 2023 -
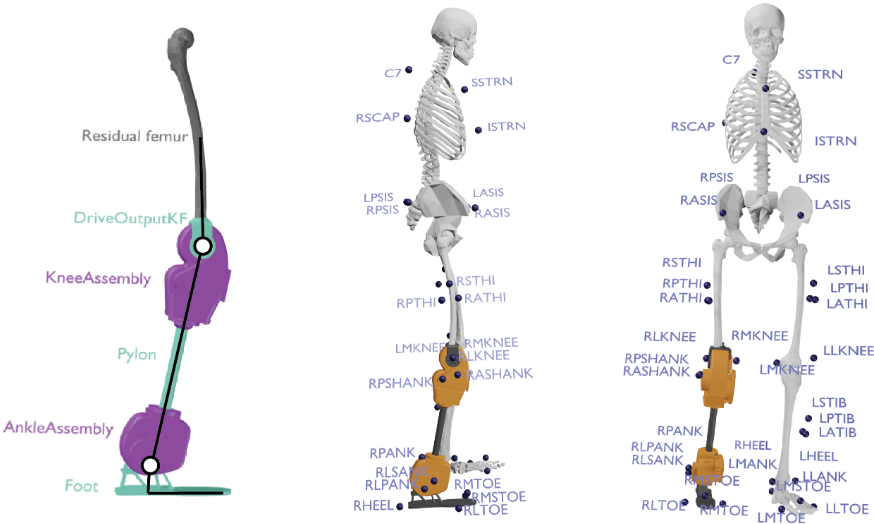 OpenSim Model for Biomechanical Analysis with the Open-Source Bionic LegInternational Symposium on Medical Robotics (ISMR), 2021
OpenSim Model for Biomechanical Analysis with the Open-Source Bionic LegInternational Symposium on Medical Robotics (ISMR), 2021 -
 NeBula: TEAM CoSTAR's Robotic Autonomy Solution that Won Phase II of DARPA Subterranean ChallengeField Robotics, 2022
NeBula: TEAM CoSTAR's Robotic Autonomy Solution that Won Phase II of DARPA Subterranean ChallengeField Robotics, 2022 -
 Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challengeContinuous-Discrete Reinforcement Learning for Hybrid Control in Robotics (CoRR), 2021
Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challengeContinuous-Discrete Reinforcement Learning for Hybrid Control in Robotics (CoRR), 2021 -
 Proprioceptive Improvements of Lower-Limb Amputees under Training with a Vibrotactile Device - A Pilot StudyIEEE Health Care Innovations and Point of Care Technologies Conference (HI-POCT), 2017
Proprioceptive Improvements of Lower-Limb Amputees under Training with a Vibrotactile Device - A Pilot StudyIEEE Health Care Innovations and Point of Care Technologies Conference (HI-POCT), 2017
